RSPyD Plane Detection
- Categories: Plane Detection, Python
- Project URL: https://github.com/lupeterm/RSPyD
Project Description
During my time at the chair of software engineering, I created a Python implementation of the RSPD plane detection algorithm.
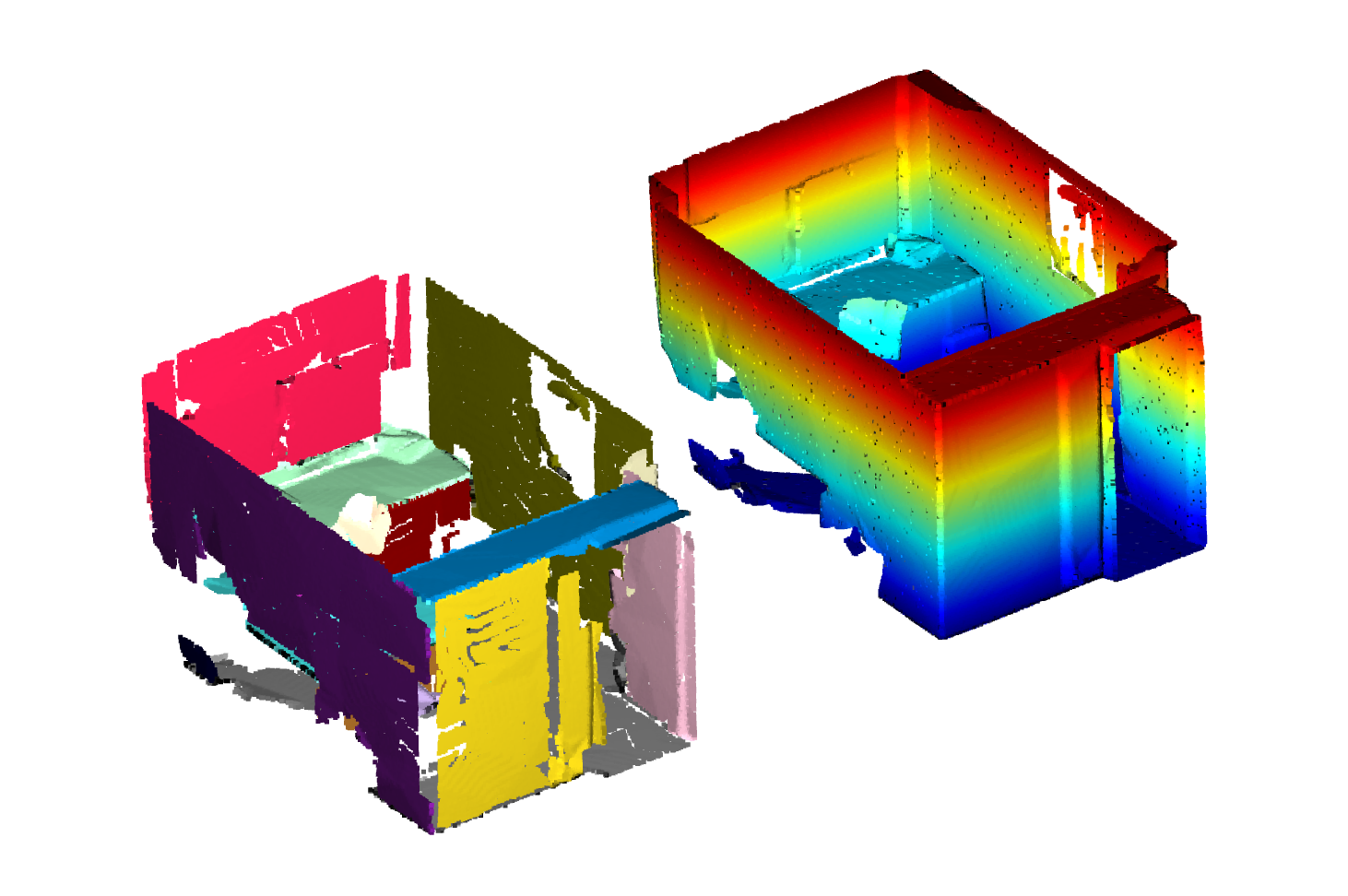
To quickly summarize the algorithm's idea: After estimating the normals for each point inside the cloud, a region growing approach is used to iteratively grow and potentially combine groups of points. Therein, different quality measures
to ensure planarity are used to remove plane outliers or surfaces with too much curvature.
To not reinvent the wheel, my implementation relies on NumPy and Open3D for certain functionalities, e.g., the normal estimation step. Moreover, reaching a compromise between efficiency and precision, I've employed some
voxel down sampling. This greatly reduces the cloud size, as even the smallest scenes from the 2D-3D-S dataset contain hundrets of thousand of points.